Estimación de Masa para Manipuladores usando el Observador de Modo Deslizante
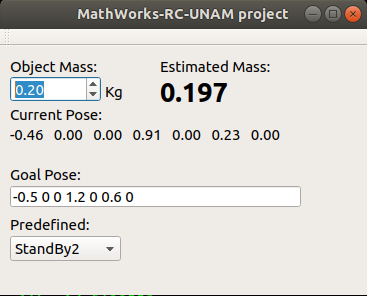
Este proyecto es desarrollado en el contexto de la competencia Robocup@Home. Proponemos estimar la masa de un objeto manipulado utilizando técnicas de reconstrucción de fallas. Considerando el peso del objeto como una perturbación que causa un comportamiento defectuoso, dicho peso se puede estimar utilizando un observador de modo deslizante. La estimación de la masa del objeto manipulado se puede utilizar para mejorar las tareas de manipulación cuando la información visual no es suficiente para identificar correctamente un objeto (por ejemplo, una lata vacía y una lata llena).
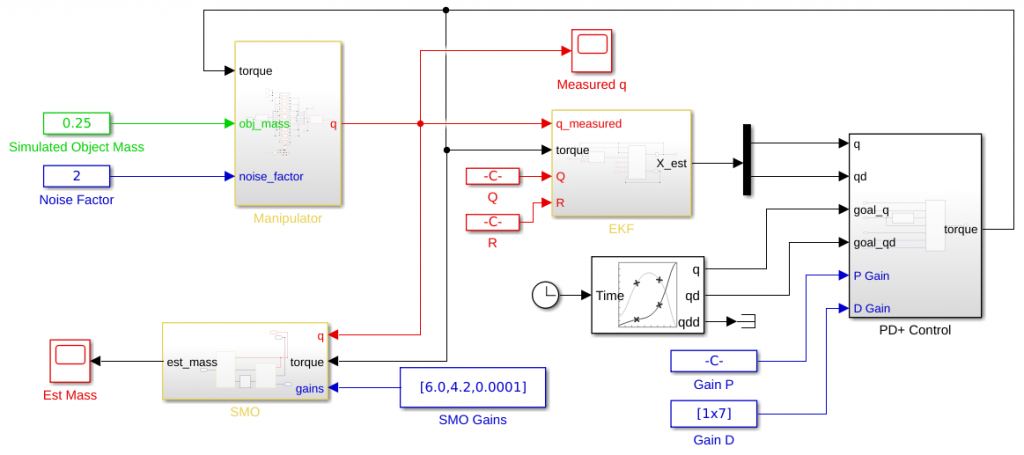
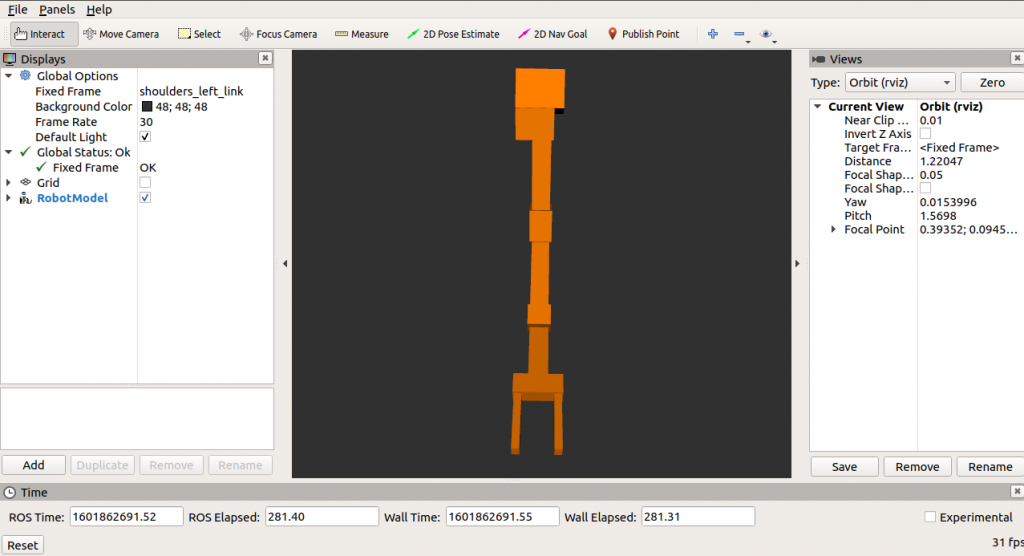
El sistema general fue diseñado y probado usando Simulink Toolboxes, este repositorio contiene los archivos e instrucciones para reproducir los resultados obtenidos usando dos manipuladores diferentes: Katana (https://github.com/uos/katana_driver) y el brazo izquierdo de Justina (robot desarrollado en el Laboratorio de Biorobotica, UNAM https://biorobotics.fi-p.unam.mx/robot-justina/).