El robot HSR (siglas del inglés, Human Support Robot), también llamado Takeshi por el laboratorio de Bio-Robótica, es un robot de servicio semi-humanoide diseñado y desarrollado por la empresa Toyota, cuyo objetivo es asistir a personas con capacidades limitadas o de edad avanzada en sus actividades diarias, ya sea en una casa o en una oficina. Su propósito principal es servir como una plataforma de desarrollo académico para diversos algoritmos y sistemas autónomos. Al comienzo del proyecto del HSR en el laboratorio de Bio-Robótica, se adaptó el software del robot Justina para el robot Takeshi, con el objetivo de demostrar la modularidad del sistema y los algoritmos implementados en otra plataforma de desarrollo.
Las principales áreas de desarrollo son los siguientes:
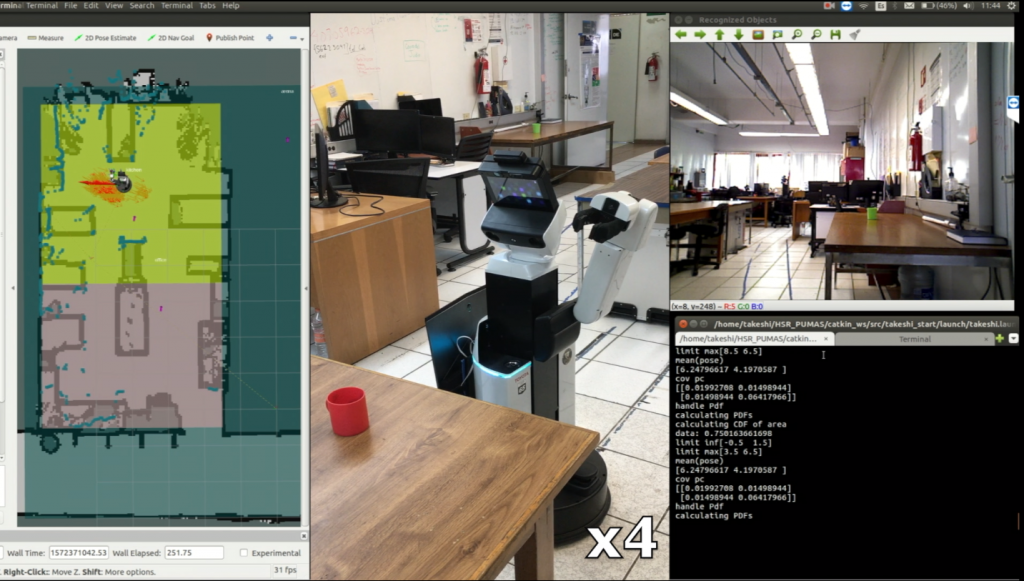
Detección de objetos con una cámara RGB-D.
Manipulación de objetos con un brazo robótico con cuatro grados de libertad.
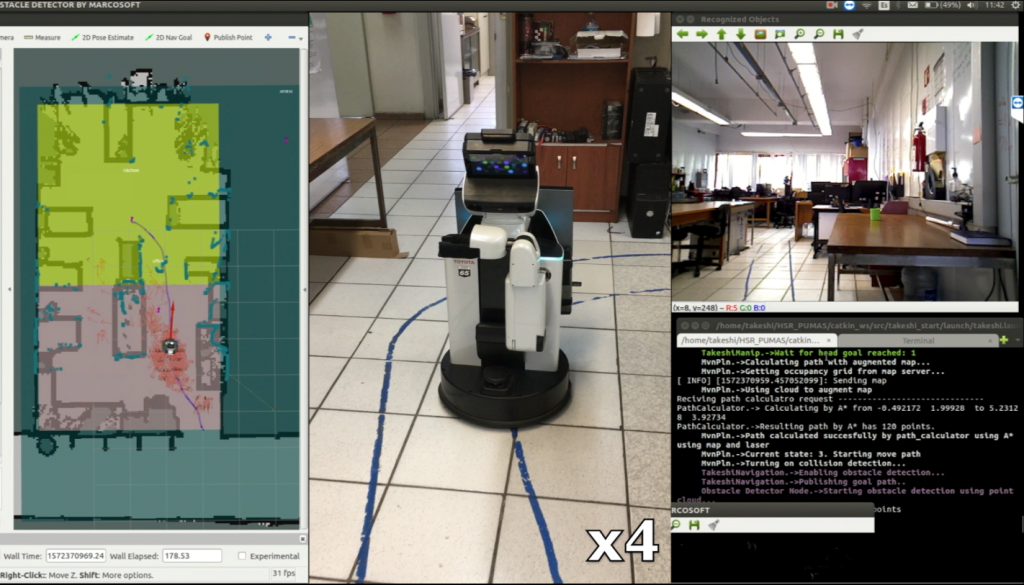
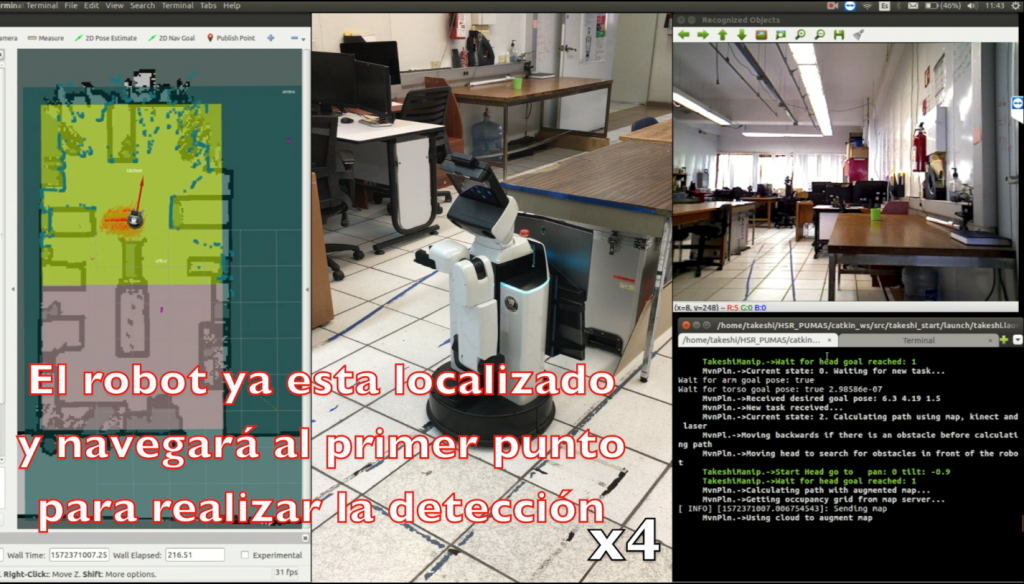
Navegación autónoma con evasión de obstáculos en ambientes dinámicos.
Reconocimiento de lenguaje natural, como voz y gestos.
Planeador de acciones.
Takeshi forma parte de un convenio de desarrollo de software entre la UNAM y Toyota-Japón, producto de los buenos resultados obtenidos en la competencia mundial RoboCup en el año de 2017 con el robot Justina. De la misma manera, Takeshi tiene grandes logros participado en la RoboCup, ha obtenido un segundo lugar en el año 2018 (Montreal, Canadá) y un cuarto lugar en el año 2019 (Sídney, Australia) en la categorı́a RoboCup@Home DSPL.
Previo
Siguiente
Proyectos y Publicaciones
Sistema SLAM basado en Modelos Ocultos de Markov (HMM)
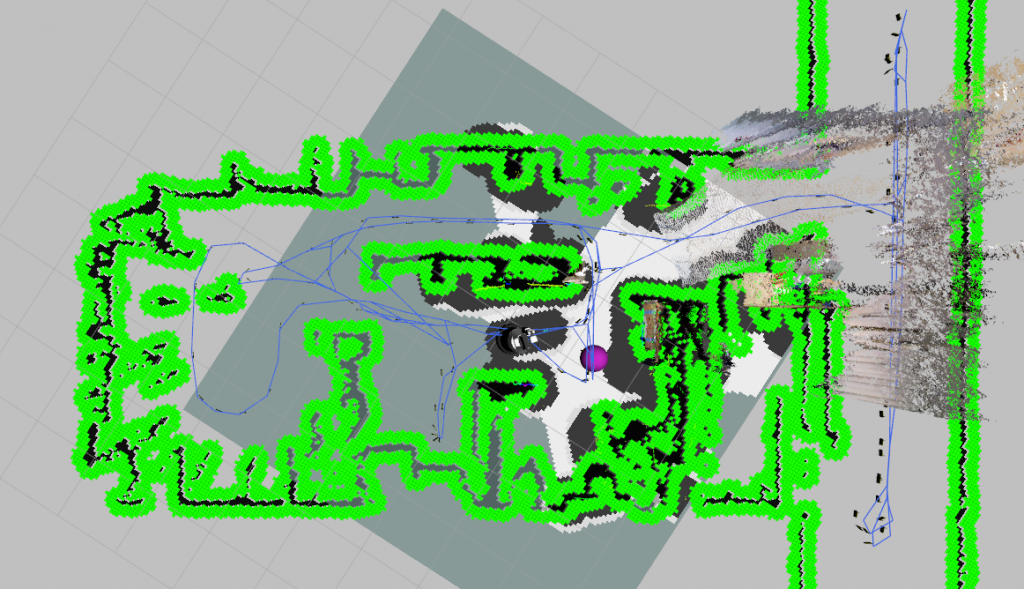
Presentamos un sistema SLAM gráfico basado en modelos ocultos de Markov (HMM) en el que las lecturas del sensor se representan con diferentes símbolos utilizando una serie de técnicas de agrupamiento. Luego, los símbolos se fusionan como una única predicción para mejorar la tasa de precisión utilizando un HMM dual. La versatilidad de nuestro sistema le permite trabajar con diferentes tipos de sensores, e implementar, ya sea activo o pasivo, un gráfico SLAM. Se utilizó el robot Toyota HSR para probar, entrenar y obtener el conjunto de datos. El método fue probado en entornos de competición tanto reales como simulados. Resolver el problema del robot secuestrado, entrenar una representación, mejorar en línea y, en general, resolver el problema de SLAM.
Detección de objetos con Redes Neuronales Convolucionales
Previo
Siguiente
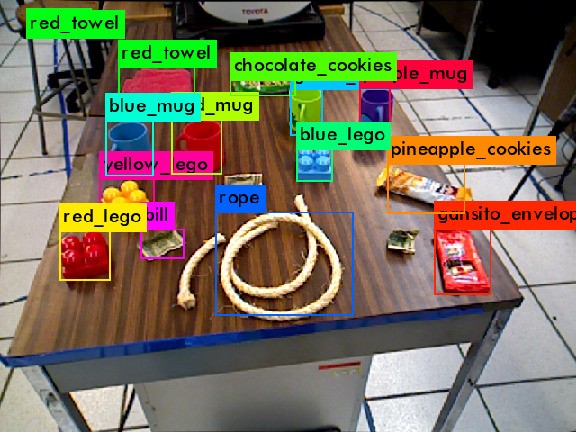
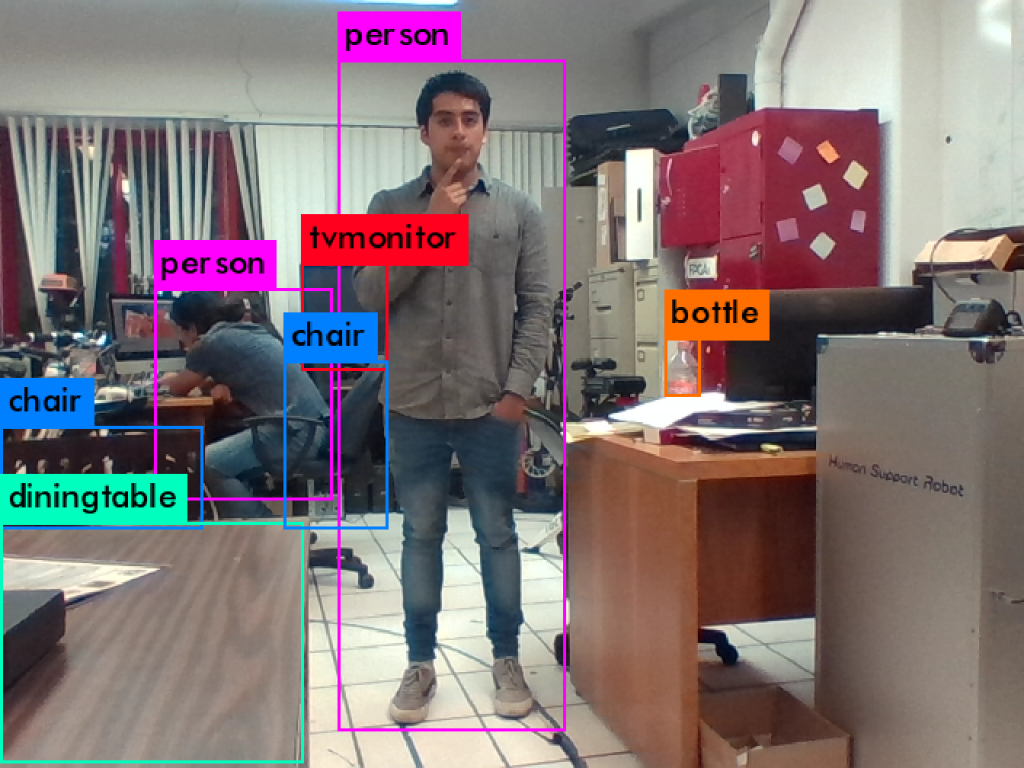
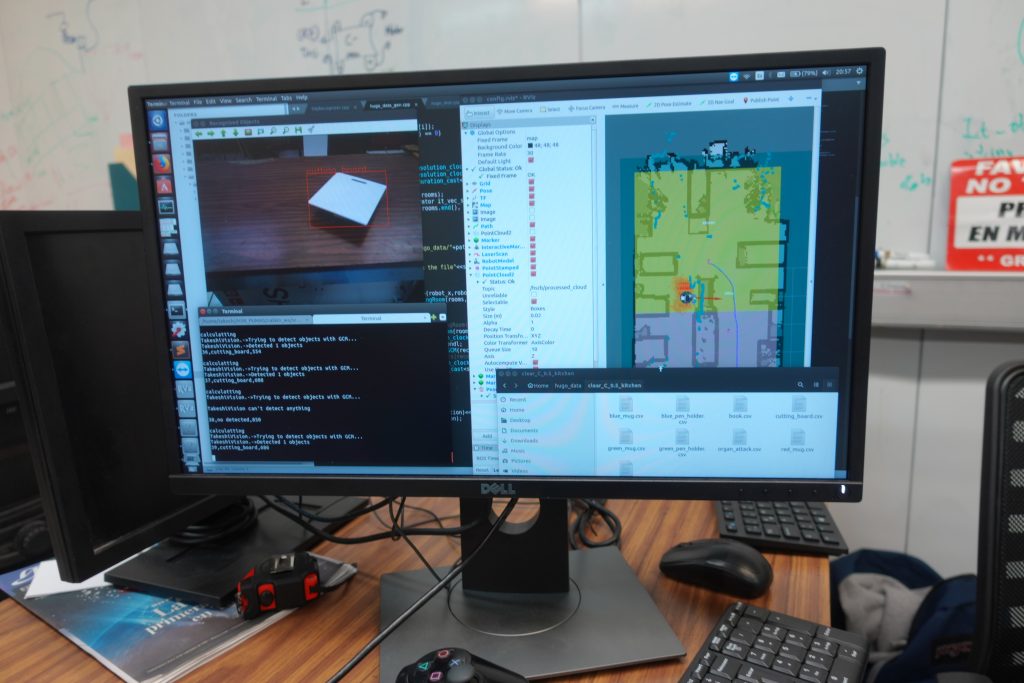
En la de tesis de maestría (“Detección de objetos con Redes Neuronales Profundas para un Robot de Servicio”, Edgar Roberto Silva Guzmán 2020), se plantea un sistema capaz de generar una base de datos de imágenes etiquetada de manera automatizada a partir de un archivo de video, que posteriormente se utiliza para el entrenamiento de una Red Neuronal Convolucional (YOLOv3). Además, se plantea un sistema de detección de objetos que utiliza esta Red Neuronal Convolucional en un robot de servicio.
El primer sistema está conformado por dos módulos principales desarrollados en ROS: el primer módulo segmenta un objeto de cada cuadro proveniente de un archivo de video. El segundo módulo crea la base de datos de imágenes sintéticas, es decir, escenas artificiales que contienen los objetos segmentados y etiquetados del módulo anterior, después, se aplican técnicas de aumento de datos para generar un conjunto de datos más robusto. El sistema puede generar miles de imágenes etiquetadas con 30 objetos aproximadamente en cada una en minutos. Por último, se configuran los parámetros de entrenamiento para la Red Neuronal Convolucional YOLOv3.
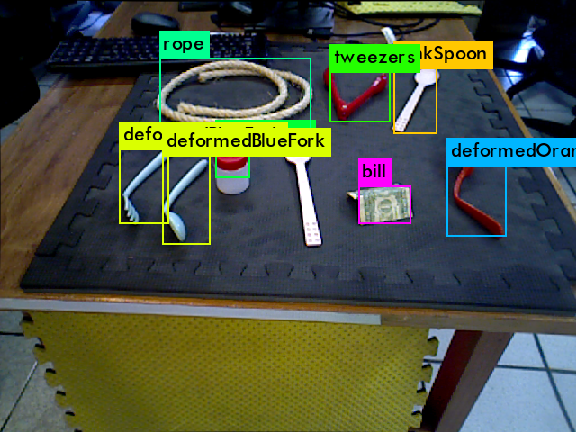
En el segundo sistema, se propone una metodología para que, un robot de servicio, pueda manipular un objeto de manera autónoma. Las entradas del sistema son las imágenes adquiridas por una cámara RGB-D. Después, se detectan los objetos en un espacio bidimensional utilizando el modelo entrenado de la Red Neuronal Convolucional. Posteriormente, se hace el cálculo del centroide de cada objeto en un espacio tridimensional y se evalúa la mejor forma de manipular el objeto. Por último, se evalúa si el objeto ha sido manipulado.
El robot Takeshi y la robot Justina son los principales proyectos de robots de servicio desarrollados en el laboratorio de Bio-Robótica de la Facultad de Ingeniería de la UNAM. Por lo cual, uno de los objetivos principales de este proyecto de tesis es aplicar los sistemas propuestos a estos robots de servicio.
Aplicación de modelos psicológicos formales en el desarrollo de Robots Móviles
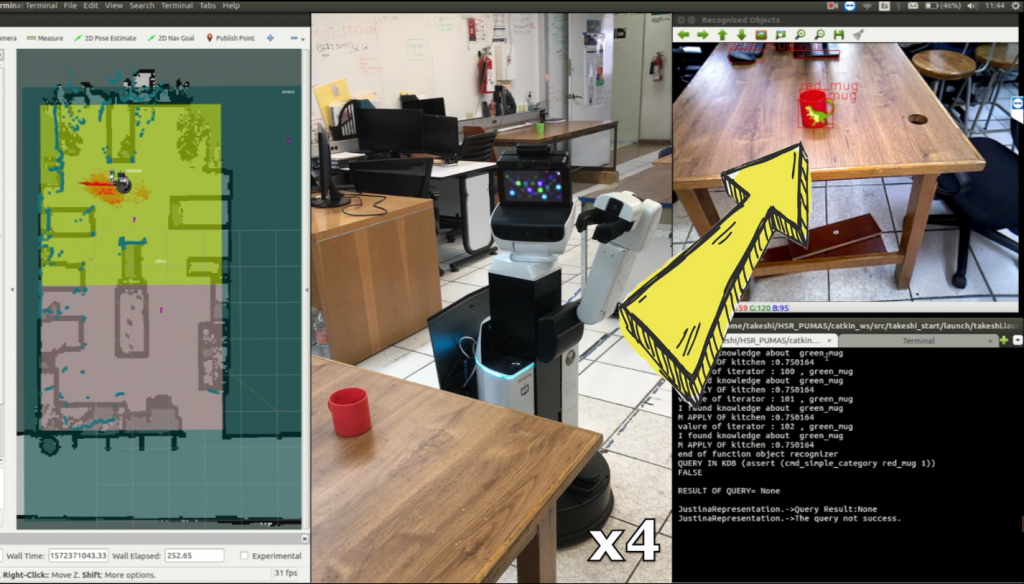
Parte de los objetivos de este trabajo es el aplicar el Modelo de Contexto Generalizado, que es paradigma que fue desarrollado por un psicólogo en los años 80 y explica como es que los humanos categorizan las experiencias sensoriales en grupos. Por lo cual, se aplicó este modelo en un sistema de reconocimientos de objetos, para poder evaluar el efecto que tiene el uso de modelos basados en seres vivos al aplicarlo en tareas básicas y esenciales de los robots.