Simulador desarrollado como parte del proyecto PAPIME-PE105524.
Requerimientos
Nota: se asume que ya se tiene instalado Ubuntu y ROS.
- $ cd
- $ git clone https://github.com/mnegretev/PAPIME-PE105524
- $ cd PAPIME-PE105524/Simulador
- $ ./Setup.sh
- $ cd catkin_ws
- $ catkin_make -j2 -l2
- $ echo “source ~/PAPIME-PE105524/Simulador/catkin_ws/devel/setup.bash” >> ~/.bashrc
- $ source ~/.bashrc
Para probar que todo se instaló y compiló correctamente:
- $ cd
- $ source PAPIME-PE105524/Simulador/catkin_ws/devel/setup.bash
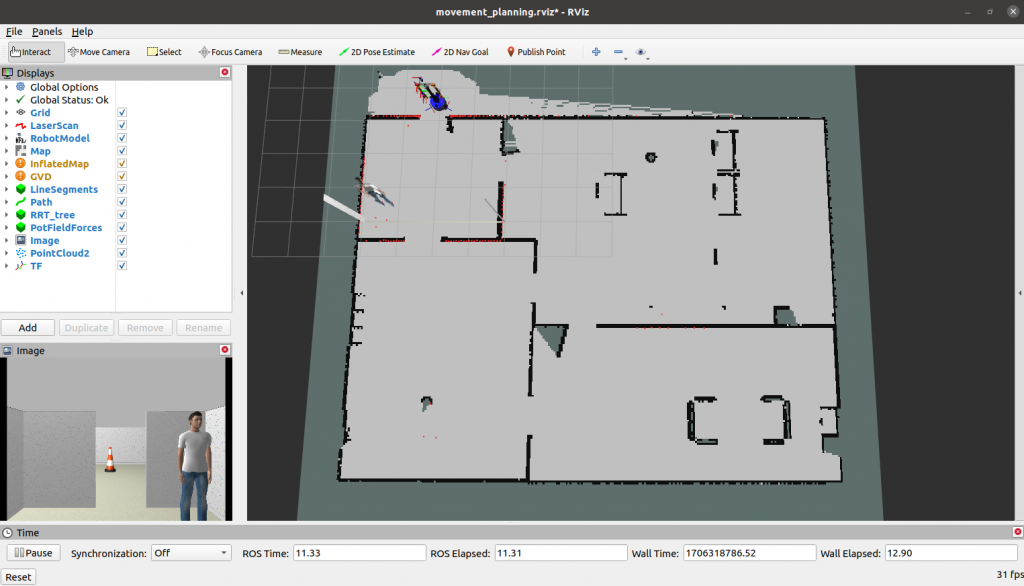
- $ roslaunch surge_et_ambula movement_planning.launch
Si todo se instaló y compiló correctamente, se debería ver un visualizador como el siguiente: